Assembly
Zero-gravity in a cramped place
10 Feb 2020
-
R.A.
The volume of the Tokamak pit may be huge, but so are the components that need to be installed. As a result, assembly operators will have very little room to manoeuvre. One tool is under development that will aid in the assembly—in a crowded environment—of the steel elements that interlink the massive toroidal field coil cases at top and bottom.

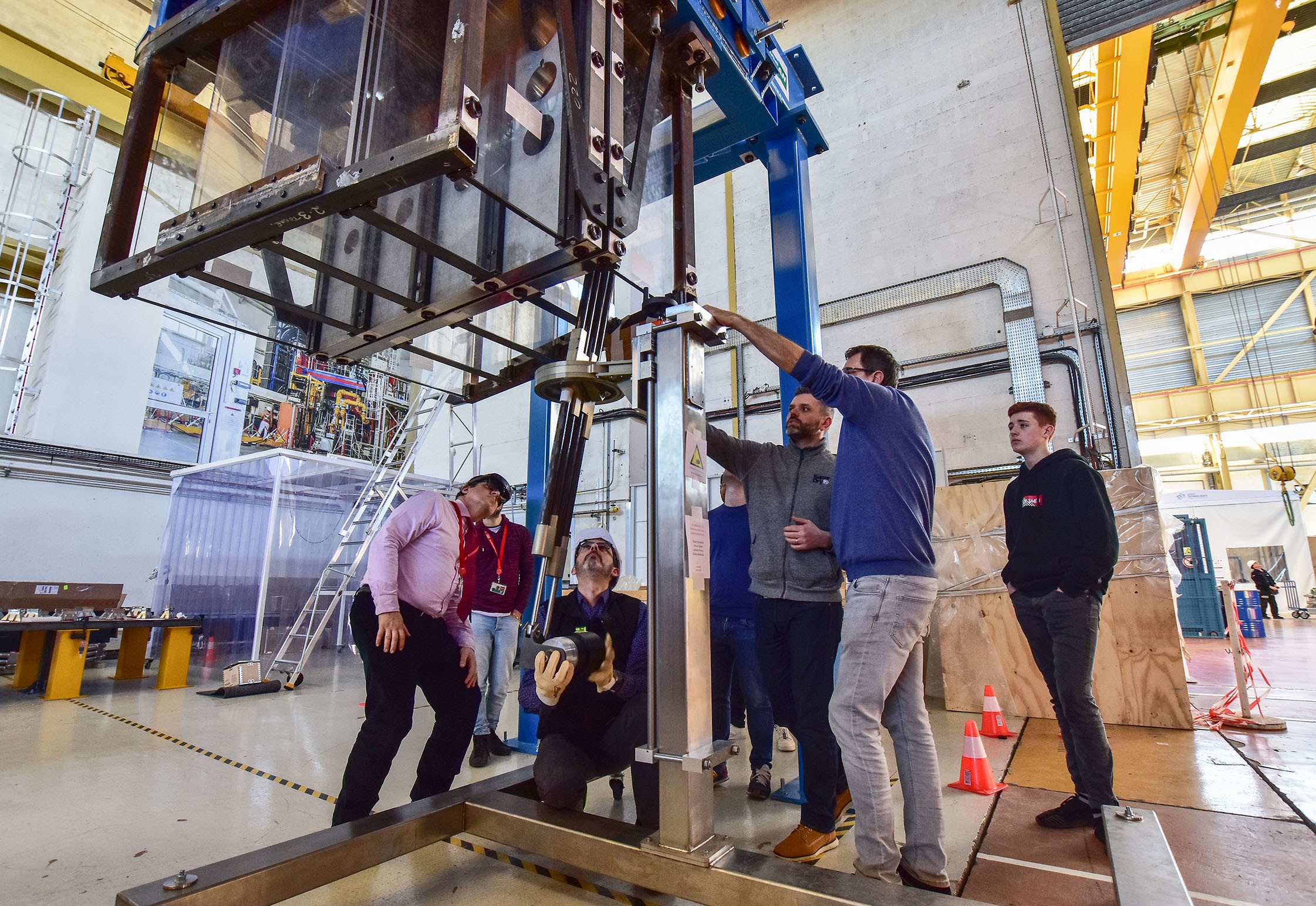
Manually operated, the "zero gravity" assembly tool is the result of a year and a half of development at CEA-Cadarache's Magnet Infrastructure Facilities for ITER (MIFI).
The assembly of ITER's steel vacuum vessel will be one of the most technically challenging operations of the machine assembly phase. One by one, nine vacuum vessel "sub-assemblies"—weighing 1,200 tonnes each, will be lowered by crane onto temporary supports in the Tokamak Pit. These sub-assemblies, created on massive tools in the Assembly Hall, associate one vacuum vessel sector, its associated thermal shield panels, and two vertical toroidal field coils.
Once in place inside the assembly pit, and before vacuum vessel sector welding operations begin, each of the toroidal field coils will be connected to the next by way of "intercoil structures" located at different levels of the 17-metre-tall toroidal field coil structures.
At the top and bottom of each coil, box-type "outer intercoil structures" will link one coil case to the next. The structures are formed from large brackets welded to the coil cases, with six cylindrical pins connecting one bracket to the next (see photo, above). The 35-kilogram pins are designed to withstand the tremendous shear forces that will be exerted by the magnetic field and to compensate for minute misalignments, inevitable with such tall and massive components.
Creating a tool that would fit into the cramped space (especially at the bottom of the coil) and allow operators to precisely handle and position each of the 35-kilogram stainless steel pins has required a year-and-half of development at the Magnet Infrastructure Facilities for ITER (MIFI)—a set of workshops and laboratories jointly operated by ITER and the French Alternative Energies and Atomic Energy Commission (CEA).

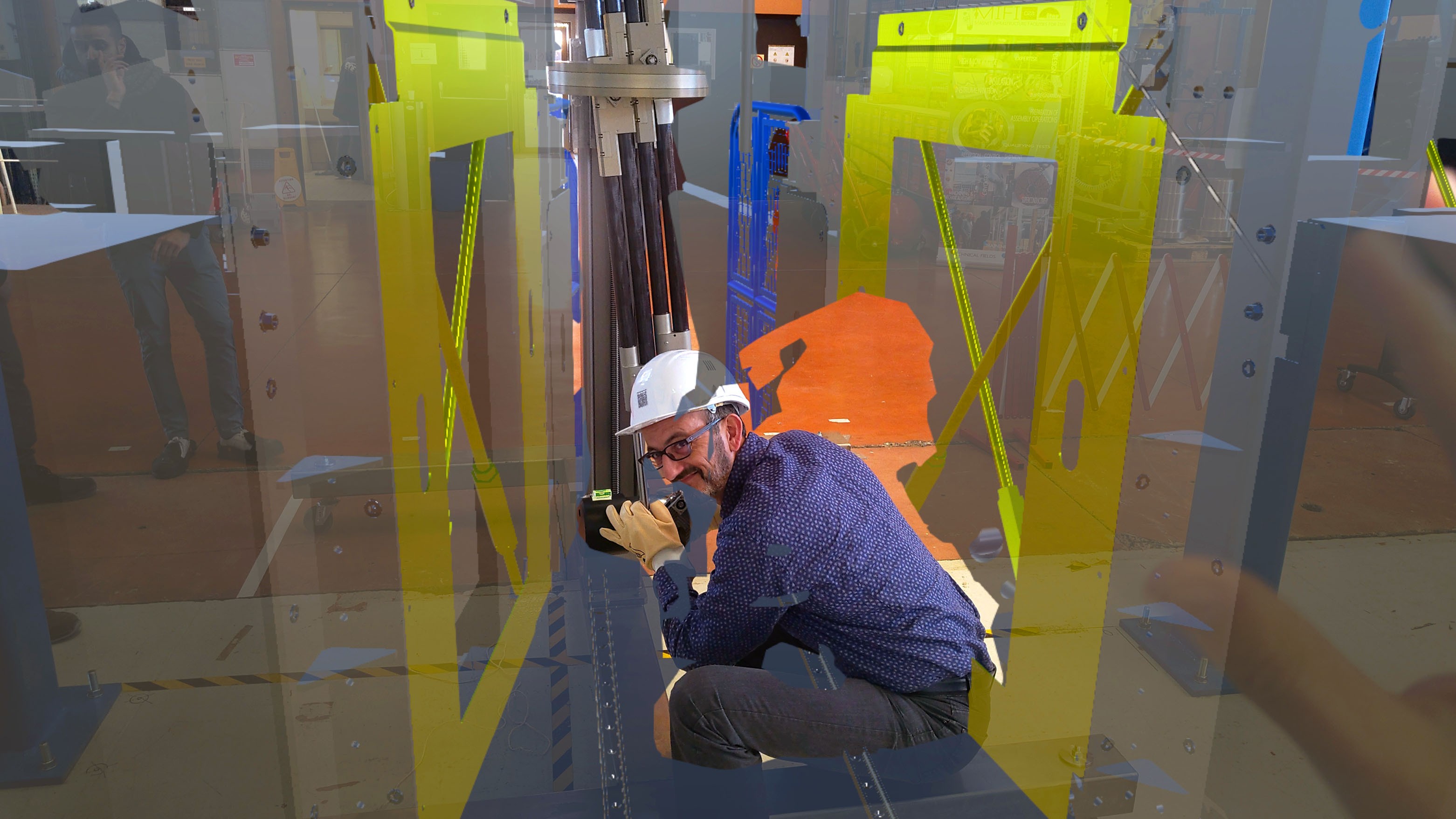
An "augmented reality" setting superimposes a virtual 3D rendition of the coil and narrow workspace environment on the steel reality of the mockup.
"CEA, and specifically the Institute for Magnetic Fusion Research (IRFM) here in Cadarache, has the engineering know-how and the 'tokamak culture' that was indispensable to developing this assembly tool," explains Bertrand Peluso, the MIFI technical coordinator on CEA side.
Fabien Ferlay, the CEA mechanical engineer who led the development team at MIFI, says that the tool was "inspired by robotic arms and telemanipulators." Manually operated, it uses a zero-gravity "mass compensation" system¹ that enables the operators to exert minimal effort as they move the heavy pins into position. And it is "as compact as possible" to fit and operate within the confined space below the vertical coils.
The handling and positioning tool has been successfully demonstrated on a mockup of the box-type outer intercoil structure at MIFI. And it comes with an option, which the team presented last week to the ITER Organization and assembly contractor representatives (TAC2 contract)—an "augmented reality" setting that superimposes a virtual 3D rendition of the coil and workspace environment on the steel reality of the mockup.
The mockup and tool have now left Cadarache for the SIMIC facility in Italy. As a partner in the TAC2 machine assembly consortium, SIMIC will finalize the equipment, add functionalities for extra actions such as inserting custom shims or tightening the "superbolt" nuts, and test how the assembly sequence unfolds.
When all this is done, the mockup and tool will return to a workshop close to ITER, where future operators will train in the art of connecting, by hand, components as high as a six-storey building and weighing several hundred tonnes.
¹In a "zero-gravity" device, a system of counterweights, cogwheels and a synchronization shaft balances the mass that needs to be handled.